|
ソーラーパネルの太陽追尾装置の開発 速報 2009.2.23 |
太陽からのエネルギーを最も効率よく得るためには、太陽光に対しソーラーパネルを直角に配置する必要がある。太陽からのエネルギーをP0、ソーラーパネルの角度をα、パネルの変換効率(その他ロスを含む)をη、実質発電エネルギーをPとした場合次の関係式が成り立つ。
P=P0×η×cosα
ここでα=90°(太陽光に直角)の場合、Pは最大となる。ソーラーパネルを日照期間中できるだけ太陽光に直角になるよう制御することで、固定設置に比べてはるかに大きなエネルギーを得ることが出来る。
今回、最大発電出力70W(DC12V用 1200×530×35mm)のソーラーパネルを用い、その駆動機構およびソーラーセンサーを開発したので、その概要を紹介する。
写真―1、2に太陽追尾テスト状況を示す。
|
写真―1 |
写真―2 |


太陽追尾装置としては、従来より同期モーターによる方式はあるが、コストを抑える目的で、自動車用のワイパーモータを用い、間欠的に追尾する方式を採用した。また太陽追尾センサーは出来るだけ単純な構造とロジックを用いた。
写真―3に太陽追尾センサーを示す。このセンサーは回転するソーラーパネルに結合しており、常に太陽光を捉えるようにソーラーパネルを回転駆動させる。
|
写真―3 ソーラーセンサ |
図−1太陽追尾回路 |

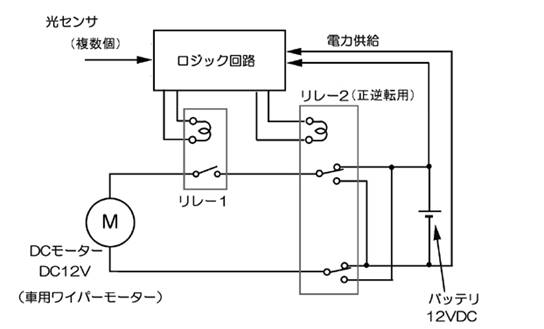
図-1に太陽追尾回路(概略)を示す。
|
写真―4 |
写真―5 |


写真―4、5はソーラーパネルを駆動するワイパーモータ部で、減速回転軸にゴムタイヤを取り付け、この回転でソーラーパネルを回転させる。駆動トルクは充分ある。
テスト結果考察
(1)この太陽追尾システムは完全無人で毎日日の出から日の入りまでを追尾させるもので、晴天であれば日没時は西を向いている。翌日東から太陽が上がれば、センサーがそれを検知して、ソーラーパネルを東に向ける。この機能は問題なくクリアーされた。
(2)太陽高度は東、西で低く、南中時に最大になる。この要求に対し、この機構は春秋分の黄道位置に合せた上下角自動可変機構を有しており、これも問題なく作動した。
(3)太陽追尾精度は今回のセンサーとロジックの組み合わせでは約4分、角度にして約1°(約4分に1回モーターが動く)であったが、これほど精度を上げる必要はないものと考えている。(30分:7.5°または1時間:15°程度でよい)
(4)現在のソーラーパネルは殆どが固定設置式である。太陽追尾が安くできれば、これを採用した方が効率がよい。今回の開発はこのような潜在ニーズを掘り起こす目的で行なっているものであり、実用化に向けて更に検討を進めていく予定である。
2009.2.24 T.Hoshino
|
|